|
|

|

|
| e-Pub |
Section: New Results
Situation Awareness
Participants : Christian Laugier, Alejandro Dizan Vasquez Govea, Procópio Silveira-Stein, David Sierra-Gonzalez, Mathieu Barbier, Stephanie Lefevre(uc Berkeley).
Framework for Motion Prediction and Collision Risk Assessment
Participants : Christian Laugier, Alejandro Dizan Vasquez Govea, Procópio Silveira-Stein, Stephanie Lefevre(uc Berkeley).
For several years, the challenging scientific problem of Motion Prediction, Risk Assessment and Decision-Making in open and dynamic environments has been one of our main research topics (see activity reports of the former e-Motion Inria team-project). Throughout 2016, we have continued this line of work by developing several new frameworks for Motion Prediction and Collision Risk Assessment in complex dynamic scenes involving multiple moving agents having various behaviors.
A first contribution has been the extensive experimental validation in real conditions –together with the University of Berkeley– of our Intention-Expectation approach: a high-level approach to risk assessment which avoids the complexity of trajectory-level reasoning while being able to take multi-vehicle interactions into account [9] . These results have also been integrated into a Mooc course at the graduate and undergraduate levels [25] . They have also been presented in several invited talks [24] [21] [22] [23] .
Another contribution relies in the implementation of some the proposed models on two experimental vehicles (Lexus and Zoé experimental platforms). As mentioned in section 7.2.5 , several experiments on short-term collision risk assessement have been successfuly conducted with these platforms (c.f. [10] , [15] ). This work will be continued in 2016, in the scope of our ongoing collaborative projects with Toyota, Renault and IRT nanoelec.
Planning-based motion prediction for collision risk estimation in autonomous driving scenarios
Participants : David Sierra-Gonzalez, Alejandro Dizan Vasquez Govea, Christian Laugier.
The objective is to develop a collision risk estimation system capable of reliably finding the risk of collision associated to the different feasible trajectories of the ego-vehicle. This research work is done in the scope of the Inria-Toyota long-term cooperation and of the PhD thesis work of David Sierra- Gonzales.
|
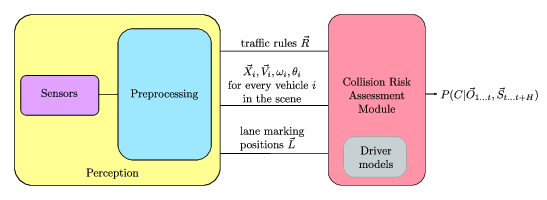
Figure 10 shows the black box model of the system. At a given timestep, the system takes the following inputs: the traffic rules in effect; the position, velocity, angular velocity and heading of each vehicle in the scene; and the position of the lane markings. Thus, at each timestep we construct an observation vector 1 with all the high-level perception inputs, and a state vector with only the minimum variables necessary to describe the scene. The proposed system aims to calculate the probability of collision of the ego-vehicle for a sequence of future states up until a fixed time horizon . That can be expressed as . This information can then be used by a path-planner to decide upon the safest trajectory.
One key factor for the correct estimation of collision risk is the ability to predict the motion of the dynamic obstacles in the scene, that is, the other drivers. We opt here for a planning-based approach, which assumes that drivers instinctively act as to maximize a reward (or equivalently, minimize a cost). This reward function encodes the preferences of the driver to, for instance, keep a minimum distance with the vehicle in front, drive in the right lane in the highway, or respect the speed limits. Given such a reward function, Markov Decision Processes (MDP) constitute an adequate framework for the motion prediction problem. Moreover, by using Inverse Reinforcement Learning (IRL) algorithms, we can obtain such reward function directly from expert demonstrations (i.e. simply observing how people drive).
At this point, two well-known IRL algorithms ( [26] , [58] ) have been implemented and used to obtain a generic driver model from human demonstrations performed on a highway simulator. This driver model can now be used to predict the future behavior of the dynamic obstacles in the scene.